DeepMind新AI协调机器人完成复杂制造任务
发布时间:2025年9月25日
来源:szf
快速阅读: 团队在工作单元中随机放置障碍物,挑战机器人完成40项任务。通过图神经网络技术,新AI RoboBallet能在几秒内规划出复杂环境中的最优路径,展现高效任务执行能力。
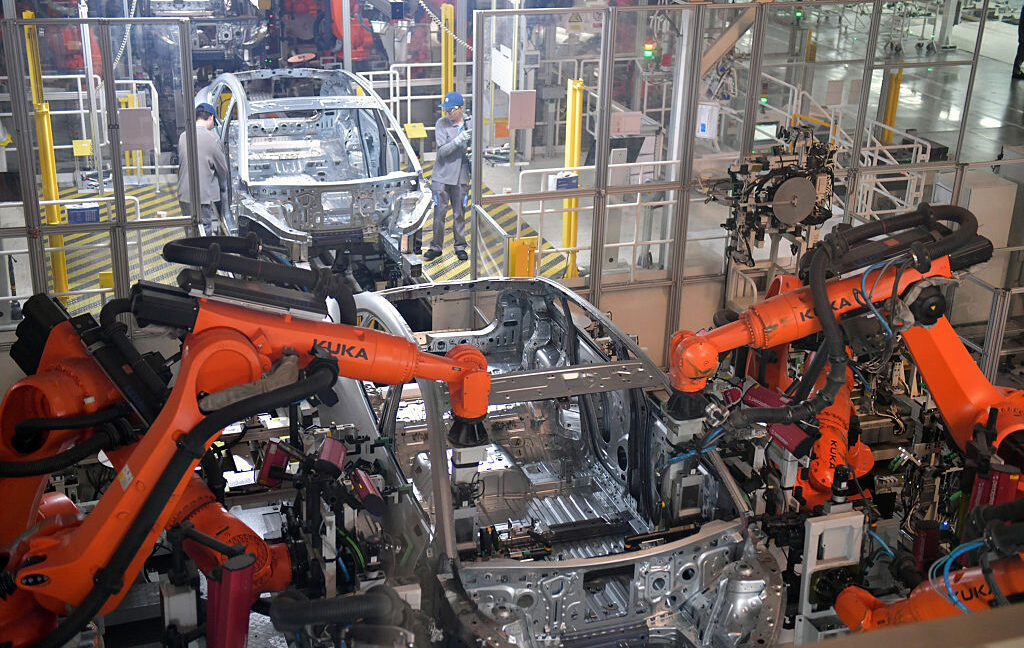
为了增加难度,团队在每个工作单元中随机放置了障碍物,机器人必须避开这些障碍。赖解释说:“我们选择最多使用八台机器人,因为这是在不频繁相互阻挡的情况下紧密排列机器人的合理最大数量。”团队还让机器人在一个工件上完成40项任务,这被认为代表了实际工厂的需求。
这样的设置即使是使用最强大的强化学习算法也会非常棘手。赖和他的同事们通过将所有问题转化为图来解决这一难题。在这个模型中,节点和边构成了复杂的图。机器人、任务和障碍物都被视为节点,它们之间的关系被编码为单向或双向边。单向边连接机器人与任务和障碍物,因为机器人需要知道障碍物的位置以及任务是否已完成。双向边连接各个机器人,因为每台机器人都需要了解其他机器人的实时状态,以避免碰撞或重复任务。
为了读取并理解这些图,团队使用了图神经网络,这是一种设计用于提取节点间关系的人工智能技术,它通过沿着连接传递消息来实现这一点。这简化了数据,使研究人员能够设计出一个系统,专注于最重要的目标:在导航障碍的同时找到完成任务的最有效方法。经过几天的训练,使用单个Nvidia A100 GPU在随机生成的工作单元上训练后,新的工业规划AI——RoboBallet,能够在几秒钟内规划出通过复杂且之前未见过的环境的可行路径。
(以上内容均由Ai生成)