探索基于单头和多头 CNN 和 Lstm 的模型,使用车载多 IMU 数据进行路面分类
发布时间:2025年7月9日 来源:szf
快速阅读: 据《Nature.com》最新报道,准确的道路监测依赖高效数据方法。本研究比较了单头和多头深度学习模型,利用IMU数据进行道路分类。结果表明,CNN+LSTM模型表现更优,最佳模型达到0.9338宏F1值。研究建议优化架构与扩展数据集以提升精度。
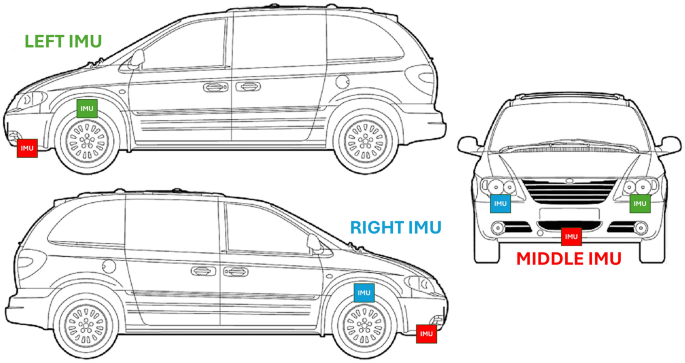
准确的道路表面监测对于保障车辆和行人的安全至关重要,这依赖于高效的数据采集与分析方法。本研究探讨了使用单头和多头深度学习架构对道路表面状况进行分类,特别是卷积神经网络(CNN)以及结合长短期记忆(LSTM)层的CNN,应用于安装在车辆悬挂部分和非悬挂部分的惯性测量单元(IMU)所采集的数据。
测试了多种模型架构,结合了来自不同位置的IMU数据,并利用了加速度和角速度等特征进行了网格搜索,以优化架构的超参数,包括滤波器数量、内核大小和LSTM单元数。
结果表明,CNN+LSTM模型通常优于仅使用CNN的模型。性能最佳的模型采用了单头架构中三个IMU的数据,达到了0.9338的宏F1值。
该研究指出,在单头架构中结合IMU数据的有效性,并建议通过优化架构和扩充数据集,尤其是在更复杂的道路表面类别上,可以进一步提升分类精度。
(以上内容均由Ai生成)







