具有同步运动和传感能力的磁性软体机器人
发布时间:2025年6月15日
来源:szf
快速阅读: 据《Nature.com》最新报道,图4a显示微型机器人模仿蠕虫运动,通过磁场驱动呈现波浪形路径。图4b显示机器人在特定磁场下平均速度1.4毫米/秒,横向位移线性变化,垂直位移呈波浪状。相关运动可生成信号,支持双向爬行。
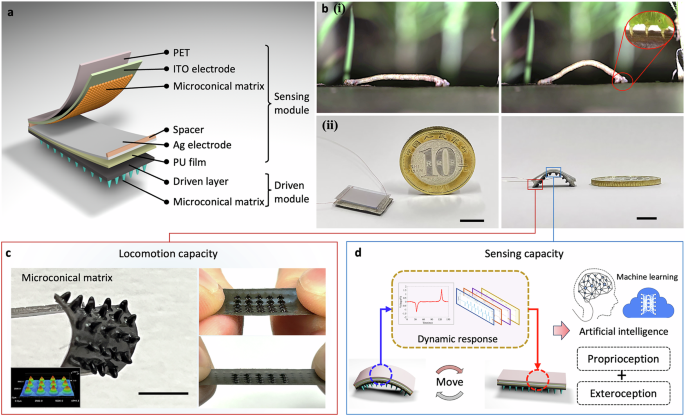
图4a展示了蠕虫与微型机器人原型在动态运动方面的比较。微型机器人爬行运动呈现出波浪形路径,并通过推拉运动完成。一块厚度为6毫米的丙烯酸板作为机器人移动的基底。一个永磁体提供动态磁场,由三轴运动平台驱动(补充图13)。如补充图14所示,当永磁体的运动被调节为遵循X-Y平面内的“O”轨迹时,磁铁与驱动模块之间的距离和角度会定期变化,从而诱导微型机器人发生变形。
最初,当永磁体位于下方时,机器人没有显著变形。随着永磁体从前方向软机器人移动时,微型机器人开始弯曲,并在磁力矩梯度力的作用下形成弓形结构,拉动身体向前移动。最初,当永磁体位于下方时,机器人没有显著变形。随着永磁体逐渐向后移动,弓形结构变平并恢复至初始状态。因此,在永磁体周期性运动的作用下,微型机器人可以逐步向前移动。微型机器人的动态运动可参见补充影片3。因此,在永磁体周期性运动的作用下,微型机器人可以逐步向前移动。弯曲模式下的传感模块可生成相应信号(补充图15)。此外,通过调整“O”轨迹方向,可改变爬行方向,从而实现连续双向爬行运动,如补充影片4所示。
图4b显示了在100毫特斯拉磁场强度和1赫兹频率下原型机器人横向位移(蓝线)和垂直位移(红线)的实验结果。横向位移呈线性变化趋势,而垂直位移呈周期性波浪状变化。微型机器人以平均速度1.4毫米/秒前进。
(以上内容均由Ai生成)