通过模仿飞鼠来改进飞行无人机
发布时间:2025年5月6日
来源:szf
快速阅读: 《黑客日》消息,韩国研究团队将飞鼠滑翔技术应用于四轴飞行器,通过机器学习开发出推力-翼协调控制(TWCC)控制器,提升其在复杂环境中的灵活性。尽管续航受限,该技术为智能飞行工具发展奠定基础。
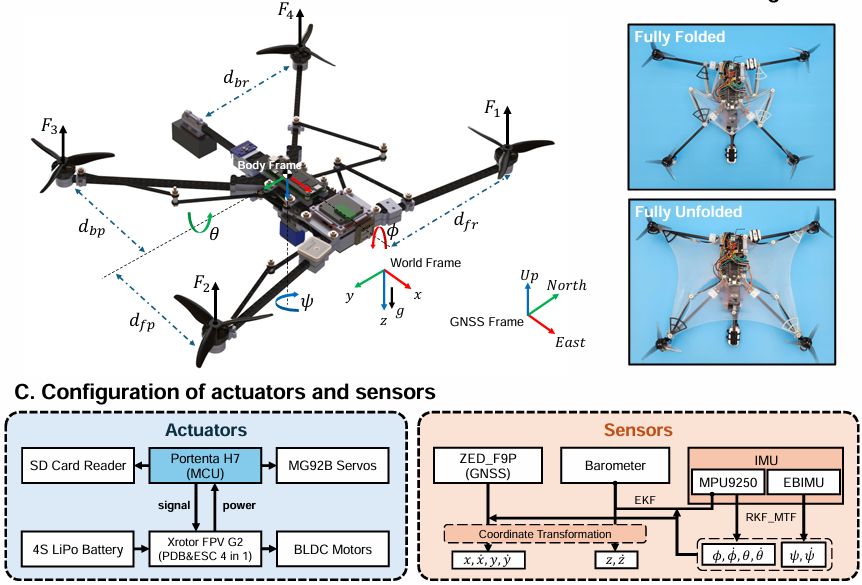
凭借能够独立调节每个电机推力的优势,四轴飞行器相较于传统飞机更加灵活。然而,一组韩国研究团队致力于将飞鼠的技术应用到四轴飞行器上,以打造更具操控性的无人机平台。结合机器学习技术,据说这一创新显著提升了原型机在复杂障碍环境中的灵活性。
飞鼠(Pteromyini部族)在其手腕和脚踝之间拥有大面积的翼膜,它们利用这些翼膜从一棵树滑翔到另一棵树时控制飞行方向,同时借助蓬松的大尾巴实现空气制动,避免因高速撞击树干而产生剧烈震动。通过借鉴这些原理,并在四轴飞行器上增加类似机制——在旋翼间展开类似翼膜的结构,研究人员开发出一种新型控制器(推力-翼协调控制,TWCC)。该控制器负责协调翼膜的展开与无刷电机的推力。
研究人员并未依赖传统的试错方法来开发控制器算法,而是通过模拟数据进行预训练,随后利用监督学习优化模型。在测试轨道上的避障实验中,基于循环神经网络(RNN)的控制器表现明显优于普通的四轴飞行器。
当然,这一设计也存在一些不足之处,例如额外的重量和阻力导致这些飞鼠无人机的续航能力较短。但若要设计一款能够在空中完成惊险特技后稳稳停驻于表面的飞行无人机,这种技术或许正是理想之选。
这项突破性进展不仅为无人机领域注入了新的活力,也为未来探索更加智能、高效的飞行工具奠定了坚实基础。
(以上内容均由Ai生成)







