非结构化环境下红花花期红花丝采摘点的检测及定位方法研究
发布时间:2025年3月29日
来源:szf
快速阅读: 《Nature.com》消息,本研究提出一种基于DSOE方法的采收点检测与定位模型,优化金丝花分类并引入轻量级分割检测头,结合深度相机实现精准定位。实验显示,模型体积减小30.2%,分割准确率达95.0%,定位误差均低于3.2毫米,为智能采收机器人提供理论支持。
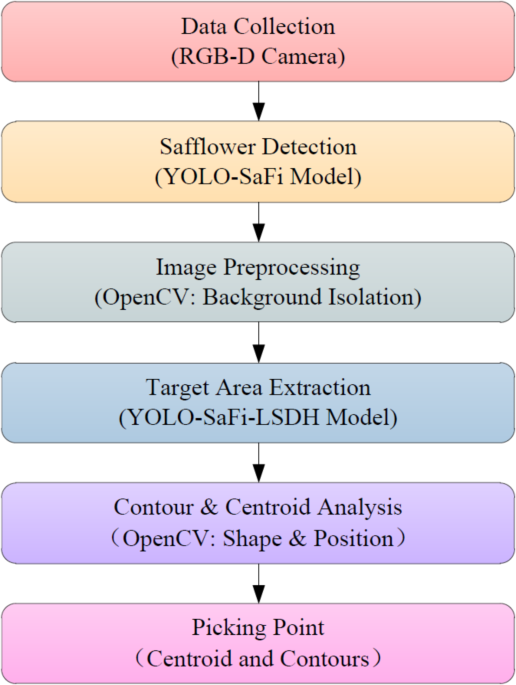
为了解决金丝花采收机器人在非结构化环境中检测和定位采收点所面临的挑战,本研究提出了一种基于DSOE(检测-分割-OpenCV提取)方法的采收点检测与定位模型,并结合深度相机的空间定位系统。首先,采用YOLO-SaFi模型优化了金丝花数据集的分类,筛选出可采收的金丝花以供进一步研究。其次,基于YOLO-SaFi模型引入了一种新型轻量级分割检测头(LSDH),高效分割金丝花和果球。接着,利用OpenCV工具包提取了金丝花和果球的轮廓信息,通过质心连线与花丝轮廓交点确定二维采收点。最后,开发了一种基于德尔塔机械臂和深度相机的空间定位控制系统,以精确确定空间采收点的位置。
实验结果表明,改进后的YOLO-SaFi-LSDH模型使模型体积减小了30.2%,同时实现了95.0%的分割准确度、95.0%的召回率以及96.8%的平均精度,显著优于传统检测头。此外,定位系统整体检测成功率达到91.0%,定位误差在X轴方向平均为2.42毫米,在Y轴方向为2.86毫米,在Z轴方向为3.18毫米。这些结果表明,所提出的模型在复杂环境中展现出卓越的检测和定位性能,为智能金丝花采收机器人的研发奠定了坚实的理论基础。
(以上内容均由Ai生成)