Nvidia 将通过 Isaac GR00T N1 基础模型加速类人机器人的开发,以实现类人推理
快速阅读: 《VentureBeat 公司》消息,英伟达推出首个开放可定制类人机器人基础模型GR00T N1及配套工具,加速机器人研发。与谷歌DeepMind及迪士尼合作开发Newton物理引擎,提升机器人学习精度。提供更多合成数据以降低开发成本,并发布多个开发者资源及活动。
英伟达推出一系列技术,推动类人机器人开发进程
英伟达推出了多项技术,旨在加速类人机器人的研发进程,其中最引人注目的是全球首个开放且完全可定制的基础模型——**Nvidia艾萨克GR00T N1**,该模型专注于通用类人推理与技能。此外,英伟达还发布了模拟框架和蓝图,如用于生成合成数据的**Nvidia艾萨克GR00T蓝图**,以及由英伟达与谷歌DeepMind和迪士尼研究所合作开发的开源物理引擎**Newton**,专门服务于机器人开发需求。
“通用机器人时代已经到来,”英伟达创始人兼首席执行官黄仁勋在一份声明中表示,“借助Nvidia艾萨克GR00T N1和全新的数据生成及机器人学习框架,全球机器人开发者将在人工智能时代翻开崭新篇章。”此消息于黄仁勋的GTC 2025主题演讲中正式公布。黄仁勋称,这或许是所有行业中最重要的进展之一。他强调,强化学习和可验证奖励(以物理学形式呈现)将成为推动机器人技术发展的关键因素。
“我们需要一种为精密软硬件设计的物理引擎,”黄仁勋补充道,“并且必须由GPU加速,以确保虚拟物体能在超线性时间内运行。”
### **GR00T N1推动类人开发者社区发展**
**Nvidia艾萨克GR00T**能够为机器人生成合成数据。作为首个基础模型,**GR00T N1**采用了双系统架构,灵感来源于人类认知原则。
– **系统1**:快速思考的动作模型,类似于人类的反射或直觉。
– **系统2**:慢速思考模型,负责深思熟虑的决策制定。
该模型由视觉语言模型驱动,可根据环境和指令规划行动,随后由系统1将其转化为精确、连续的机器人运动。系统1通过人类演示数据和Nvidia Omniverse平台生成的大规模合成数据进行训练。
GR00T N1能够在常见任务(如抓取、搬运物体等)和复杂的多步骤任务中实现泛化,同时支持长上下文和多种技能组合。开发人员只需少量后续训练数据,即可让GR00T N1适应特定的人形机器人或任务。
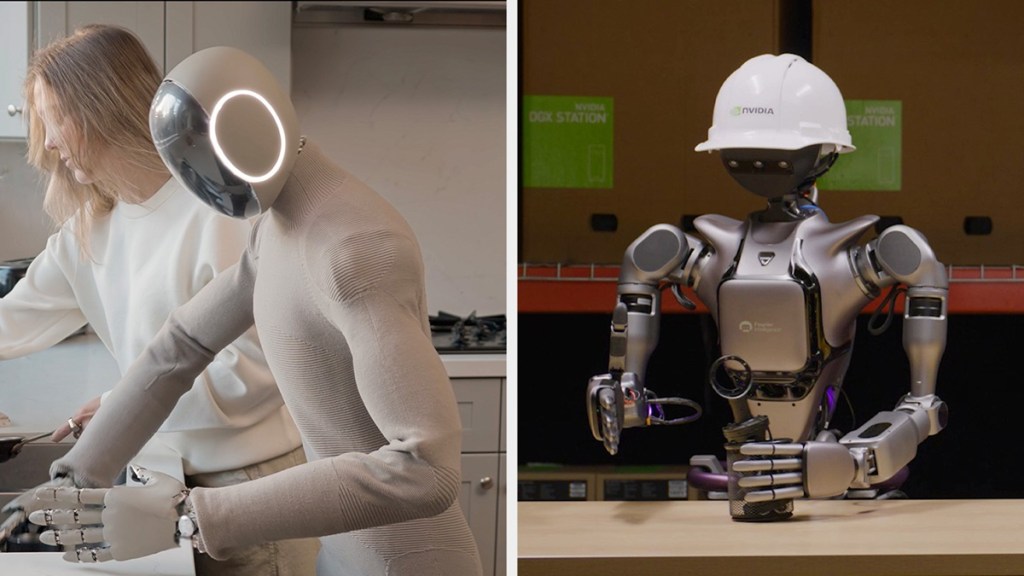
在GTC主题演讲中,黄仁勋展示了基于GR00T N1后训练策略的一台人形机器人,成功完成了自主家务整理任务。这种能力得益于1X与英伟达之间的AI培训合作。
“人形机器人的未来在于适应性和学习能力,”1X技术公司首席执行官伯恩特·伯尼奇评价道,“英伟达的GR00T N1模型为机器人推理和技能带来了重大突破,让我们能够全面部署在NEO Gamma平台上,进一步推进我们打造不仅限于工具,还能以有意义且难以量化方式辅助人类的机器人的目标。”
### **英伟达、谷歌DeepMind与迪士尼研究所的合作**
英伟达与谷歌DeepMind和迪士尼研究所联手开发了**Newton**,这是一个开源物理引擎,旨在让机器人以更高精度学习处理复杂任务。Newton基于Nvidia Warp框架构建,与Google DeepMind的MuJoCo和Nvidia Isaac Lab等模拟框架兼容,并计划整合迪士尼的物理引擎。
谷歌DeepMind和英伟达正合作开发**MuJoCo-Warp**,预计将使机器人机器学习工作负载加速超过70倍。通过谷歌DeepMind的MJX开源库和Newton,开发者可直接获取这些技术。
迪士尼研究所将成为首批利用Newton提升其下一代娱乐机器人平台的机构之一,例如在GTC主题演讲中与黄仁勋同台亮相的富有表现力的《星球大战》启发式BDX机器人。
“BDX机器人只是个开始,”华特迪士尼幻想工程研究与开发高级副总裁凯尔·拉夫林表示,“我们致力于以世界前所未有的方式赋予更多角色生命,与迪士尼研究所、英伟达和谷歌DeepMind的合作正是达成这一目标的核心环节。这项合作将帮助我们创造出比以往更具表现力和吸引力的新一代机器人角色,并以只有迪士尼才能实现的方式与我们的客人互动。”
### **更多数据用于机器人后训练**
大型、多样化的高质量数据集对机器人开发至关重要,但采集起来成本高昂。尤其是对于人形机器人而言,受限于人类示范数据的时长(每人每天仅24小时)。为此,英伟达今日发布的**Isaac GR00T蓝图**提供了解决方案。
基于Omniverse和Nvidia Cosmos Transfer世界基础模型,该蓝图允许开发者从少量人类示范数据中生成指数级的合成运动数据。例如,使用蓝图提供的首个组件,Nvidia在短短11小时内生成了78万条合成轨迹,相当于6500小时(约9个月)的人类示范数据。
结合合成数据和真实数据,GR00T N1的性能提升了40%。此外,为助力开发者社区,英伟达将GR00T N1数据集作为更大规模开源物理AI数据集的一部分发布,目前可在Hugging Face上获取。
### **可用性与开发者资源**
– **Nvidia艾萨克Lab项目GR00T模型**:相关训练数据和任务评估场景现已从Hugging Face和GitHub下载。
– **Nvidia艾萨克GR00T生成合成操作运动的蓝图**:可从build.nvidia.com获取交互式演示,或从GitHub下载。
– **Nvidia DGX Spark个人AI超级计算机**:为开发者提供开箱即用的系统,无需大量自定义编程即可扩展GR00T N1的能力至新机器人、任务和环境中。
Newton物理引擎预计将在今年晚些时候推出。
在GTC 2025期间,英伟达将举办人形开发者日活动,涵盖以下主题:
– **“构建人形机器人简介”**:深入探讨Nvidia艾萨克GR00T。
– **“了解迪士尼的机器人角色平台”**:学习迪士尼研究所如何通过BDX机器人重新定义娱乐机器人。
– **“宣布MuJoCo-Warp和Newton:谷歌DeepMind和英伟达如何增强机器人开发”**:详细介绍这些新技术及其应用。
每日环球电讯保持知情!每日获取最新资讯,订阅阅读我们的隐私政策。
(以上内容均由Ai生成)