AI 模型在 NASA 设施中掌握新地形,一次一勺

快速阅读: 《科技探索》消息,伊利诺伊大学的研究人员开发了一种自主取样模型,可以在未知地形上快速取样。该模型在NASA的海洋世界着陆器自主测试台上成功展示,通过互联网远程控制喷气推进实验室的机器人臂。模型基于6700个取样数据训练,无需修改即可适应新环境。这一成果增强了研究人员对其模型和方法的信心,并计划进一步应用于自主挖掘和施工任务。
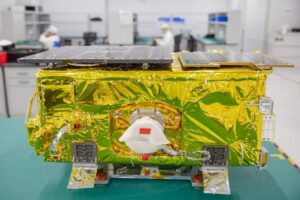
在NASA海洋世界着陆器自主测试台上拍摄的政策取样偏好快照。信用:伊利诺伊大学厄巴纳-香槟分校地外着陆器在遥远的卫星和行星表面收集样本的时间和电池电量有限。伊利诺伊大学厄巴纳-香槟分校格兰杰工程学院的航空航天和计算机科学工程研究人员训练了一个模型,使其能够自主评估并快速取样,然后在NASA设施中的机器人上展示了它的能力。航空航天博士生普拉纳伊·桑杰达表示,他们训练了机器人着陆器臂在各种材料上收集取样数据,从沙子到岩石,形成了一个包含6700个知识点的数据库。在喷气推进实验室的NASA海洋世界着陆器自主测试台上的两种地形对操作喷气推进实验室机器人臂的模型来说是全新的。这项研究“学习与地外地形采样自主性:OWLAT部署的经验报告”发表在《AIAA Scitech论坛》上。
“我们只是通过互联网建立了一个网络连接,”桑杰达说。“我连接到了喷气推进实验室的测试平台,并从他们的机器人臂相机获取了一张图像。我实时将它输入我的模型中。模型选择了类似岩石的材料开始,第一次尝试就发现这种材料无法取样。”
根据它从图像和第一次尝试中学到的知识,机器人臂移动到另一个更有可能的区域,并成功取样了另一种地形——一种更细粒度的材料。由于任务要求机器人必须取样特定体积的材料,喷气推进实验室团队测量了每次取样的体积,直到机器人完成全部取样。
桑杰达表示,尽管这项工作最初是为探索海洋世界而设计的,但他们的模型可以用于任何表面。“通常,当你基于数据训练模型时,它们只能在相同的数据分布下工作。我们方法的优点在于,我们无需更改任何内容即可在NASA测试平台上运行,因为在我们的方法中,我们实现了在线适应。”
“即使我们从未见过NASA测试平台上的任何地形,没有对其进行数据微调,我们还是直接将在这里训练的模型部署到了那里,而且模型的部署是远程进行的——这正是地外机器人着陆器在新表面上部署时所需要做的。”
“这一演示展示了我们的自适应取样模型在NASA OWLAT测试平台上的运行。该模型在伊利诺伊大学使用超过6700个地形取样样本进行了训练,并设计为在线适应未知地形,只需最少的演示。视频显示了策略从最初的失败尝试中自主学习,并在不熟悉的地形中调整其取样位置。颜色叠加层可视化了策略对最佳取样位置的实时评估。”普拉纳伊·桑杰达说。
信用:伊利诺伊大学厄巴纳-香槟分校
桑杰达的导师梅尔基奥·奥尼克是四个解决不同问题的项目之一的负责人。它们唯一的共同点是它们都是欧罗巴计划的一部分,并且都使用这个着陆器作为测试平台来探索不同的问题。
“我们是最早在这个旨在模仿欧罗巴表面的平台上展示有意义成果的人之一。看到自己几个月的工作被部署在一个真实、高保真的平台上真是太棒了。看到模型在完全不同的地形和平台上进行测试,而这些是我们从未训练过的,这增强了我们对模型和方法的信心。”
桑杰达表示,他们从喷气推进实验室团队那里收到的反馈也很好。“他们很高兴我们能够在没有太多修改的情况下部署模型。刚开始时有一些问题,但后来我发现这是因为我们是第一个尝试在他们的平台上部署模型的人,所以这是网络问题和一些简单的软件错误需要修复。”
“一旦我们让它运行起来,人们惊讶于它能在一两次取样内学会。有些人甚至不相信,直到他们看到了确切的结果和方法。”
桑杰达表示,他和他的团队必须克服的一个重要问题是使他们的设置与NASA的设置保持一致。“我们的模型是在特定位置的特定形状铲斗的相机上训练的。铲斗的位置和形状是我们要解决的两个问题。为了确保他们的机器人具有完全相同的铲斗形状,我们提供了CAD设计图,他们用3D打印制作并安装在机器人上。”
“对于相机,我们获取了他们的RGB-D点云信息,并实时将其重新投影到不同的视角,以便与我们在机器人上的设置匹配。这样,模型看到的视角与训练期间看到的相似。”
桑杰达表示,他们计划在此研究基础上进一步实现更自主的挖掘和自动化施工工作,如挖掘运河。人类更容易完成这些任务。让模型自主学习完成这些任务很困难,因为这些交互非常微妙。
(以上内容均由Ai生成)