自适应卡尔曼滤波提升北斗三号定位精度
发布时间:2025年12月9日
来源:szf
快速阅读: 据媒体报道,中国地质大学(北京)科研团队提出新型实时PPP算法,有效解决北斗三号广播星历跳变问题,在无网络环境下实现亚米级定位,静态与动态测试精度分别提升30.82%和最高45.32%。
日前,中国地质大学(北京)科研团队在北斗三号卫星导航系统高精度定位领域取得重要进展。针对北斗三号广播星历每小时更新导致的卫星钟差与轨道参数跳变问题,研究人员提出一种新型实时精密单点定位(PPP)算法,显著提升了无网络校正环境下的定位稳定性与精度。
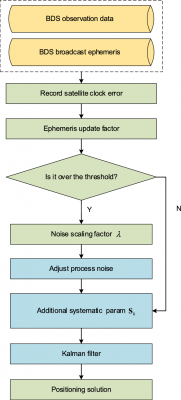
该算法引入协方差自适应卡尔曼滤波机制,可实时检测卫星钟跳并动态调整随机模型。通过增强观测模型中的系统性参数,有效补偿广播星历突变带来的误差。研究团队还设计了跳变检测因子,通过比对广播与预测钟差量化跳变幅度,并在检测到异常时自动提升过程噪声,使模型快速适应突发变化。
静态实验基于全球7个IGS测站一周数据,结果显示,新算法将三维均方根定位误差由35.62厘米降至24.64厘米,精度提升30.82%。在南海开展的10小时动态测试中,水平、垂直及三维定位精度分别提高7.32%、45.32%和39.07%,载波相位残差亦明显降低,验证了其在动态场景下的可靠性。
研究指出,该方法为远洋平台、偏远乡村、极地及应急救援等难以获取互联网校正服务的区域,提供了实现亚米级实时定位的技术路径。此外,其对广播星历不连续性的强鲁棒性,亦适用于低轨卫星定轨及依赖北斗三号信号的无人系统。未来,该技术有望集成至多系统融合导航框架,进一步提升全球导航服务的精度与可用性。
(以上内容均由Ai生成)