蝙蝠启发微型无人机助力夜间搜救
快速阅读: 伍斯特理工学院开发小型、廉价、节能的飞行机器人,可在黑暗、烟雾等恶劣条件下执行搜救任务,利用蝙蝠回声定位原理,解决现有无人机局限性。
不要被烟雾机、恐怖的灯光和假蝙蝠所迷惑:伍斯特理工学院的机器人实验室并不是在举办一场迟来的万圣节派对。
实际上,这里是一个测试场地,用于测试可以在黑暗、烟雾弥漫或恶劣天气条件下执行搜索和救援任务的小型无人机。
“当地震或海啸发生时,最先受损的就是电力线。很多时候,灾难发生在夜间,而我们不能等到第二天早晨再去救援幸存者,”机器人工程助理教授尼汀·桑凯特说。“因此,我们开始向自然界寻求答案。世界上是否有生物能够在这种环境中导航?”
桑凯特和他的学生们从蝙蝠身上找到了答案——这种有翼哺乳动物具有高度发达的回声定位能力。借助国家科学基金会的资助,他们正在开发小型、廉价且节能的飞行机器人,这些机器人可以在当前无人机无法操作的环境和时间里工作。
上个月,巴基斯坦的应急人员使用无人机寻找被困在屋顶上的民众,这些房屋因洪水而被淹没。今年8月,一支救援队使用无人机救出了一名被困两天的加州男子,他被困在瀑布后面。7月,无人机帮助找到了一条安全路线,将三名在加拿大地下被困超过60小时的矿工救出。
尽管无人机在搜救行动中越来越普遍,但桑凯特和其他研究者希望超越目前使用的手动控制单个机器人。下一步的关键是开发能够以群体形式部署并自主决定搜索位置的飞行机器人,弗吉尼亚理工大学副教授瑞安·威廉姆斯表示。
“这种类型的部署——自主无人机——几乎不存在,”他说。
威廉姆斯通过一个最近的项目解决了这个问题,该项目涉及编程无人机与人类搜救人员协调选择搜索路径。他的团队利用数千起失踪人员案件的历史数据,创建了一个模型,预测如果某人在森林中迷路会如何行动。
“然后我们利用该模型改进了无人机的定位,以便在更有可能找到人的地点进行搜索,”他说。
在伍斯特理工学院,桑凯特的项目解决了现有无人机的其他局限性,包括体积和感知能力。
“现有的机器人体积大、笨重、昂贵,且无法适应各种场景,”他说。
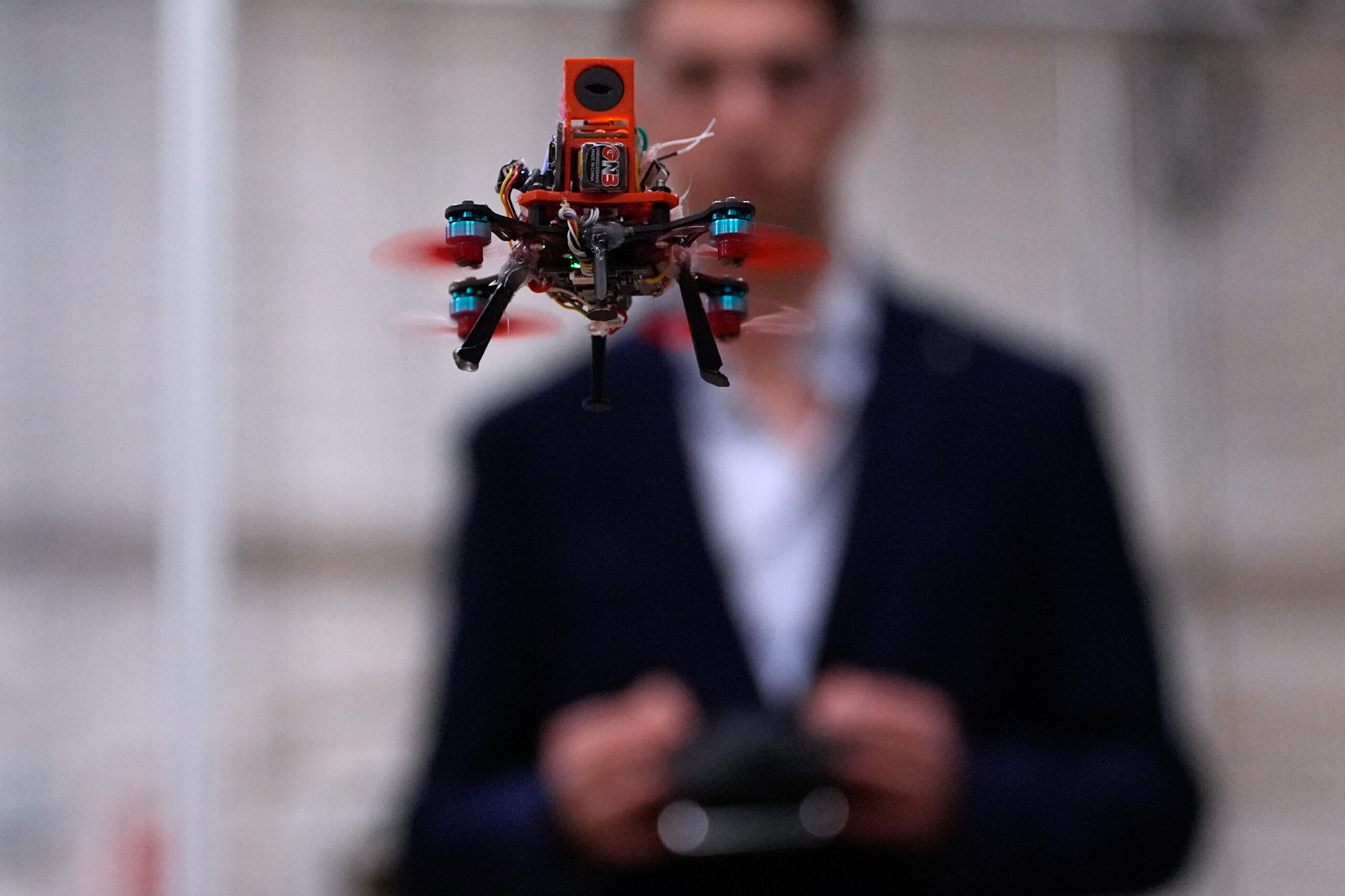
相比之下,他的无人机可以放在手掌中,主要由廉价的业余材料制成,即使在黑暗中也能工作。一个小的超声波传感器,类似于公共卫生间自动水龙头中使用的那种,模仿蝙蝠的行为,发出高频声波脉冲,并利用回声检测前方障碍物。
在最近的一次演示中,一名学生用遥控器在明亮的房间内发射了这架无人机,然后再次在关闭所有灯光,只留下微弱红光的情况下进行了测试。当它接近透明的有机玻璃墙时,无论是在黑暗中还是在烟雾和假雪飘扬的环境中,无人机都会反复停止并后退。
“目前,搜救机器人主要在白天工作,”桑凯特说。“问题是,搜救工作通常是危险、肮脏且经常在夜间进行的任务。”
然而,开发过程并非一帆风顺。研究人员发现,蝙蝠机器人的螺旋桨噪声干扰了超声波,需要3D打印的外壳来减少干扰。他们还使用人工智能教会无人机如何过滤和解释声音信号。
尽管如此,要达到蝙蝠的能力还有很长的路要走。蝙蝠能够收缩和压缩肌肉以只听特定的回声,并能从几米外探测到像人类头发一样细小的物体。
“蝙蝠令人惊叹,”桑凯特说。“我们远未达到自然界的成就。但目标是,有一天我们能达到这一水平,这些设备能在野外有效部署。”
顶部照片:2025年10月20日,周一,在马萨诸塞州伍斯特市伍斯特理工学院的实验室里,学习机器人工程的大二学生科林·巴尔福尔正在飞行一架小型无人机。(美联社照片/查尔斯·克鲁普)
版权所有2025美国联合通讯社。保留所有权利。未经许可,不得复制、广播、改写或重新分发此材料。
话题
保险科技
科技
教育
大学
(以上内容均由Ai生成)







