米大小的机器人可以改写神经外科的剧本
快速阅读: 《药物发现与开发》消息,罗布奥特公司开发了一种微型神经外科机器人,可通过小孔进入脑组织,以AI引导精准操作。它采用软体机器人技术实现无创伤推进,计划用于临床治疗胶质瘤等疾病,目前已完成融资并提交多项专利。
罗布奥特公司开发了一种神经外科微型机器人,这种半自主设备厚度几乎不超过意大利面条,能够以每分钟3毫米的速度在活体脑组织中爬行,并由人工智能引导。这款机器人是一种系留、内部推进系统,旨在减少进入深层脑病变的创伤、复杂性和成本。这家位于巴黎的初创公司于2025年1月完成了2300万英镑的A轮融资,以将机器人从动物研究推进到临床级硬件。总部设在靠近生命科学集群区域,并已提交“数十项专利”的罗布奥特公司声称,他们正在构建一个平台,这个平台可以根据手术程序的发展“插入”新的工具。
“我们正在建造所谓的‘大脑园丁’,一种可以从内部修剪、重新种植、刺激生长并照料病理性大脑的微型机器人。”罗布奥特公司的联合创始人乔安娜·卡托奇在葡萄牙辛特拉举行的LSI欧洲2024新兴医疗技术峰会上说道。截至2025年初,罗布奥特仍处于临床前研究阶段,尚未进入人体试验。
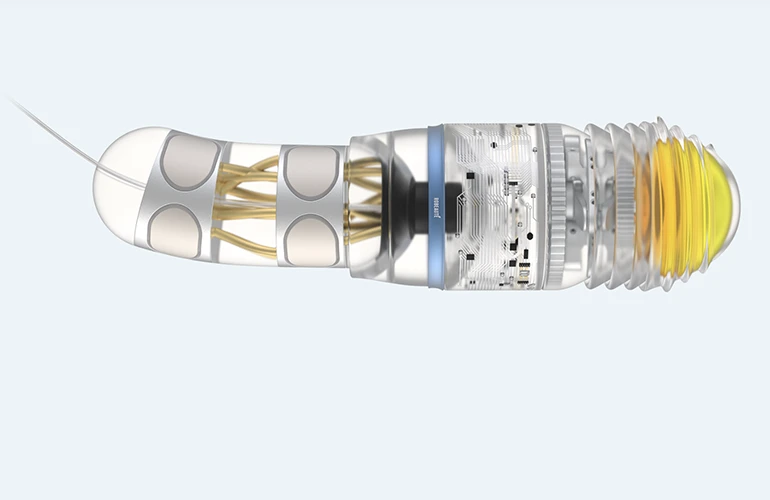
毫米级机器人的结构
该设备直径为1至2毫米,长度仅为几毫米,足够小到可以通过直径略大于铅笔芯的钻孔。在外科医生的操作下,只需要1到2毫米的开口,这大约是许多刚性立体定向套管所需直径的三分之一。一旦进入脑组织,机器人以大约每分钟3毫米的速度前进,并能以约半毫米的精度保持方向。
像Bionaut实验室这样的微尺度竞争者使用外部磁铁来操控无缆机器人。截至2025年4月,Bionaut实验室也正朝着启动其磁控微型机器人(称为’Bionauts’)的人体临床试验迈进。
无螺旋桨推进
传统导管依靠外部推拉动作或液压膨胀;这两种方式都有可能压迫脆弱的组织。罗布奥特借鉴了软体机器人技术,通过旋转硅胶环利用微粘附力实现温和的组织位移推进。这些环依次扩张与收缩,在蠕动过程中夹持与释放组织,类似于蚯蚓的动作。由于无需注入外部流体,压力波和水肿被最小化。随着机器人可能应用于人体,这一特性是一项重要考虑因素,因为即使是亚毫米级的移动也可能影响语言或运动控制。
该公司设想神经外科医生植入机器人时会首先使用常规磁共振成像来识别目标——例如,胶质瘤的几何中心。然后,AI程序可以计算出绕过血管和功能束的无碰撞走廊。罗布奥特描述了一种导航方法,结合术前基于MRI的AI规划路径和实时外部超声跟踪。理论上,连续的超声反馈会更新控制回路,对环进行微调,有助于减小累积误差并维持0.5毫米的精度范围。
(以上内容均由Ai生成)