使用优化的双边神经网络在自动驾驶汽车的非结构化道路上识别可行驶区域
发布时间:2025年4月19日
来源:szf
快速阅读: 《Nature.com》消息,研究提出一种带双注意力机制的轻量级双边语义分割网络,提升非结构化道路可驾驶区域识别的实时性与准确性,MIoU达93.89%,PA为97.32%,帧率62.49 FPS,优于其他实时分割模型,对自动驾驶安全有重要意义。
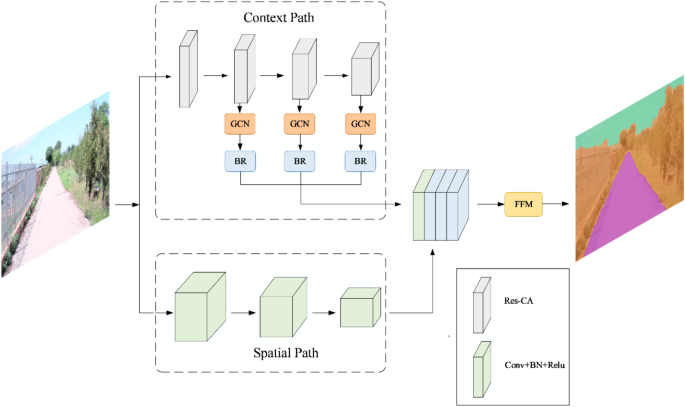
可驾驶区域识别的准确性对于确保自动驾驶车辆在非结构化道路上的安全至关重要。多样化的道路形态和模糊的边界给识别任务带来了巨大挑战。现有模型通常难以在复杂道路环境中兼顾实时性和准确性。本研究提出了一种带有双注意力机制的轻量级双边语义分割网络,通过捕获通道和空间信息来处理不清晰的对象边界和复杂背景。我们将其融入BiSeNet框架的双路径结构之中。
**高效通道注意力机制(ECA)** 被引入空间路径,用于提取非结构化道路所需的关键空间信息;而 **坐标注意力机制(CA)** 被嵌入上下文路径,用于捕捉位置信息。上下文路径采用残差网络以提升效率,并保持轻量化设计,使模型适用于自动驾驶系统。此外,全局卷积网络(GCN)和边界细化(BR)模块进一步增强了分割精度。
最终,在ORFD数据集上,该模型实现了93.89%的平均交并比(MIoU)和97.32%的整体准确率(PA),帧率为62.49 FPS。测试结果显示,该模型在确保实时性能的同时提高了准确性,优于其他先进的实时分割模型。所提模型为实现即时且高精度的可驾驶区域识别提供了极具潜力的解决方案,这对自动驾驶车辆在动态和非结构化环境中的安全高效运行具有重要意义。
(以上内容均由Ai生成)