昆虫大小的跳跃机器人在崎岖的地形上导航并携带重型有效载荷
快速阅读: 据《技术探索者》称,麻省理工研发了一款微型跳跃机器人,能高效跨越障碍,能耗仅为飞行机器人的40%。它结合弹簧腿与翅膀,可在多种地形跳跃,并精准调整动作确保稳定。未来将加入电池和传感器,拓展应用潜力。
麻省理工学院的研究人员开发了一种跳跃机器人,解决了微型机器人面临的两大难题:利用有限能量并跨越比自身大得多的障碍。这种机器人既能在不平地形上行动自如,又不需要耗费过多能源。
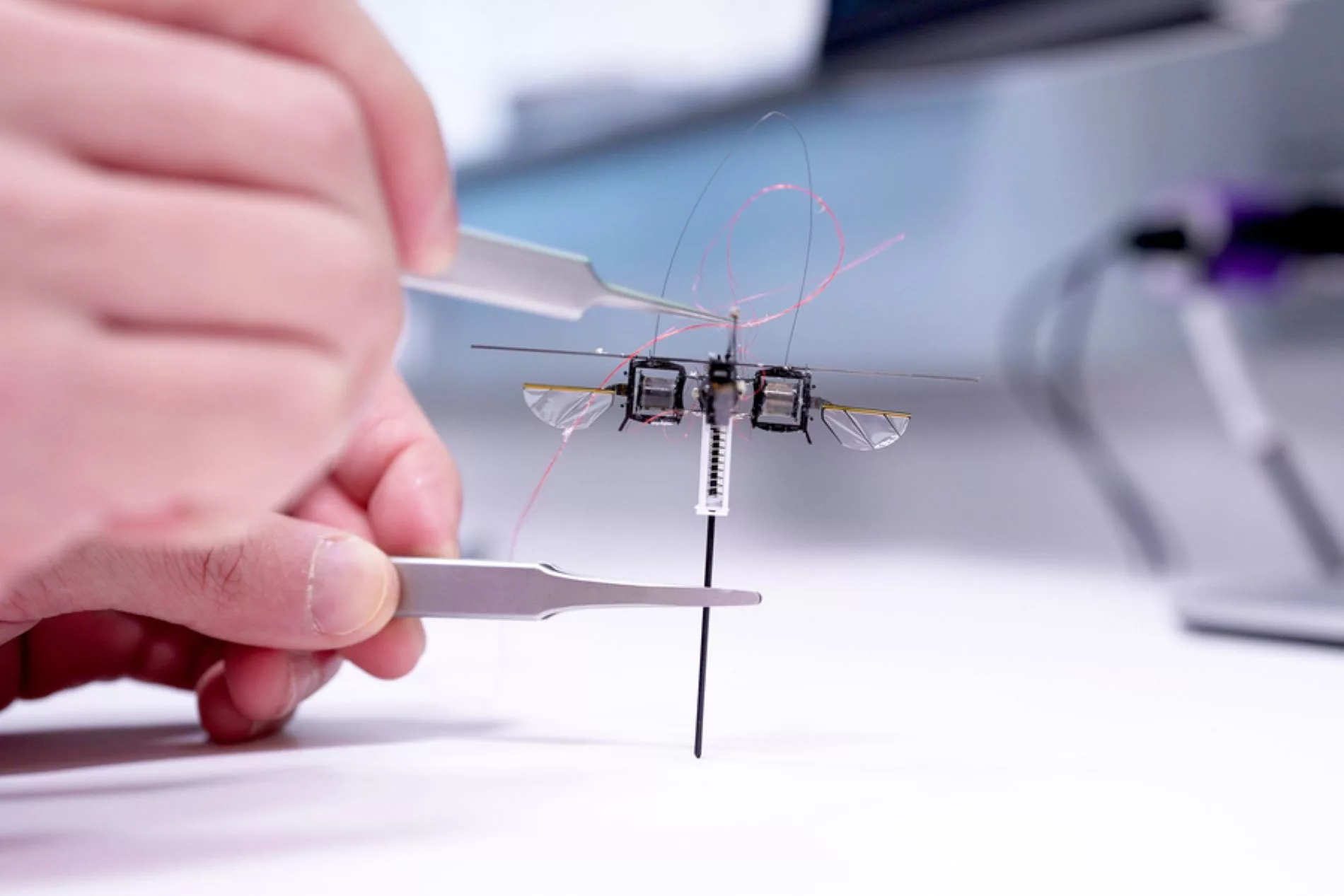
这款机器人比人类拇指还小,重量不到一枚回形针,配备了弹簧腿用于跳跃,并有四个拍打翅膀模块提供升力和平衡。由麻省理工学院工程师研发的跳跃机器人可以跳跃高达20厘米,相当于其身高的四倍,同时还能以每秒30厘米的速度横向移动。它不仅能在冰面、湿滑表面以及不平整的土壤上轻松跳跃,还能跳到悬停的无人机上。尽管具备这些动态能力,它的能耗却比飞行机器人低了60%。
这款机器人之所以如此高效,关键在于其独特的弹性腿设计,其中内置的压缩弹簧能够将机器人的向下运动转化为向上的推力,从而让每次跳跃都尽可能高效。当机器人腾空而起时,它的拍打翅膀提供升力并维持稳定性,确保它在下一次跳跃前处于正确位置。这些翅膀由软致动器驱动,这是一种人工肌肉设计,能够承受反复撞击地面,保证机器人耐用且正常运行。
机器人卓越的表现得益于一个快速观测算法,该算法在每次跳跃时计算机器人的最佳定位。通过外部运动追踪系统收集传感器数据,观测算法处理这些信息,并决定最佳调整方案以实现最优运动。机器人在空中时遵循一条优雅的抛物线轨迹。到达最高点时,它计算即将落地的位置,然后根据这些信息,其控制器确定下一次跳跃的理想起飞速度和方向。在空中,机器人拍打翅膀调整方向,确保以正确的角度和姿态着陆,从而继续有效移动并达到所需速度。
由于其轻便耐用的设计和节能跳跃方式,该机器人可以携带比类似尺寸的空中机器人重十倍的负载,解锁了各种新的应用场景。研究人员在草地、冰面、湿玻璃和不平整土壤等多种地形上测试了机器人的能力,结果表明它通过了所有测试,甚至在动态倾斜表面上也成功跳跃。着陆表面的角度不会影响机器人——只要避免在接触时滑倒,以保持轨迹和动量即可。机器人的控制器允许它平稳适应不同表面,毫不犹豫地调整其动作。例如,在草地上跳跃需要额外推力,因为草叶会降低跳跃高度。为了弥补这一点,控制器在飞行过程中增加对翅膀的能量供应。
其小巧的体积和轻量化设计使其具有较低的转动惯量,使其更加敏捷,比大型机器人更好地处理冲击。机器人尤其引人注目的是其敏捷性,研究人员展示了令人惊叹的杂技翻滚,并演示了它在不造成任何损害的情况下跳上飞行中的无人机的能力——这一功能具有潜在的合作任务应用价值。虽然机器人已经在测试中携带了两倍于自身的重量,但其载荷能力可能更大。限制其载荷能力的关键在于弹簧的效率,而非附加重量。
展望未来,研究团队计划通过加装电池、传感器和电路来提升机器人的功能。这项研究发表在《科学进展》杂志上,作者包括Yi-Hsuan Hsiao和Songnan Bai等人。
—
**昆虫尺度的混合运动:结合飞行和跳跃以提高效率和多功能性**
DOI:10.1126/sciadv.adu4474
—
**推荐内容**
Sewbo机器人:一台可以缝制T恤的机器人
首款能够玩井字棋的机器人系统
一种能够自行进行实验的移动机器人
科学家首款能够玩井字棋的机器人系统采用一种新方法表示机器人操作器
—
**广告**
(以上内容均由Ai生成)







